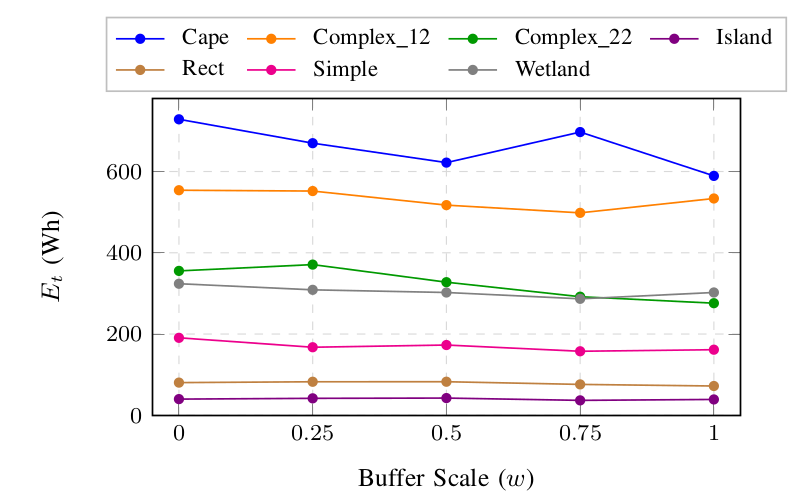
We evaluate four sweep orientation strategies and assess the sensitivity of the buffer
parameter, then compare MRCPP and EAMCMP head-to-head in an obstacle-rich environment
across different fleet sizes.
Table III. Orientation Ablation — Fleet Energy Across Scenarios
Four sweep orientation strategies evaluated across seven benchmark scenarios.
Metrics: total fleet energy including depot round-trips
(Et [Wh]) and
coverage-only fleet energy
(Ēt [Wh]).
Bold marks the lowest Et per scenario.
| Scenario |
| Et | Ēt |
Et | Ēt |
Et | Ēt |
Et | Ēt |
| Cape |
589.21 | 464.64 |
662.84 | 537.14 |
586.37 | 470.08 |
652.80 | 540.78 |
| Complex-12 |
533.65 | 506.20 |
486.15 | 457.19 |
507.58 | 470.05 |
478.14 | 455.74 |
| Complex-22 |
275.91 | 253.37 |
278.34 | 260.82 |
256.92 | 241.55 |
276.91 | 257.23 |
| Island |
39.00 | 32.43 |
40.67 | 33.13 |
39.60 | 31.57 |
37.82 | 29.77 |
| Rect |
72.09 | 59.45 |
72.76 | 61.70 |
74.71 | 62.27 |
68.21 | 55.16 |
| Simple |
161.45 | 143.66 |
119.85 | 104.45 |
117.90 | 104.46 |
123.98 | 108.65 |
| Wetland |
161.45 | 143.66 |
119.85 | 104.45 |
117.90 | 104.46 |
123.98 | 108.65 |
Min-Width achieves the lowest Et in three of seven scenarios
(Complex-12, Island, Rect), while PCA is best in three others (Cape, Complex-22, Simple).
MAR and Angle Search are never the top performers. The spread between best and worst orientation
can exceed 35% (Simple), confirming sweep direction is a significant design parameter.
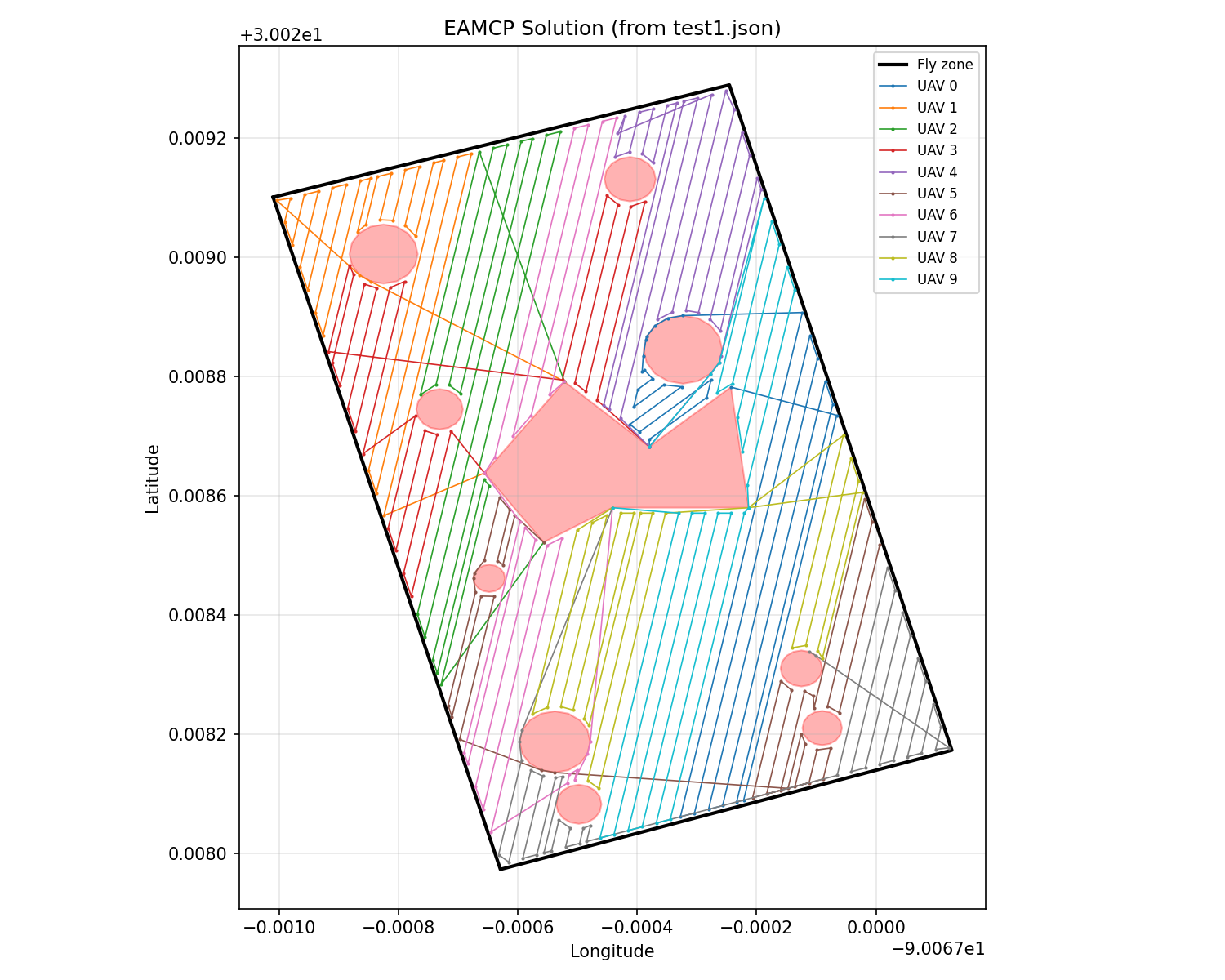
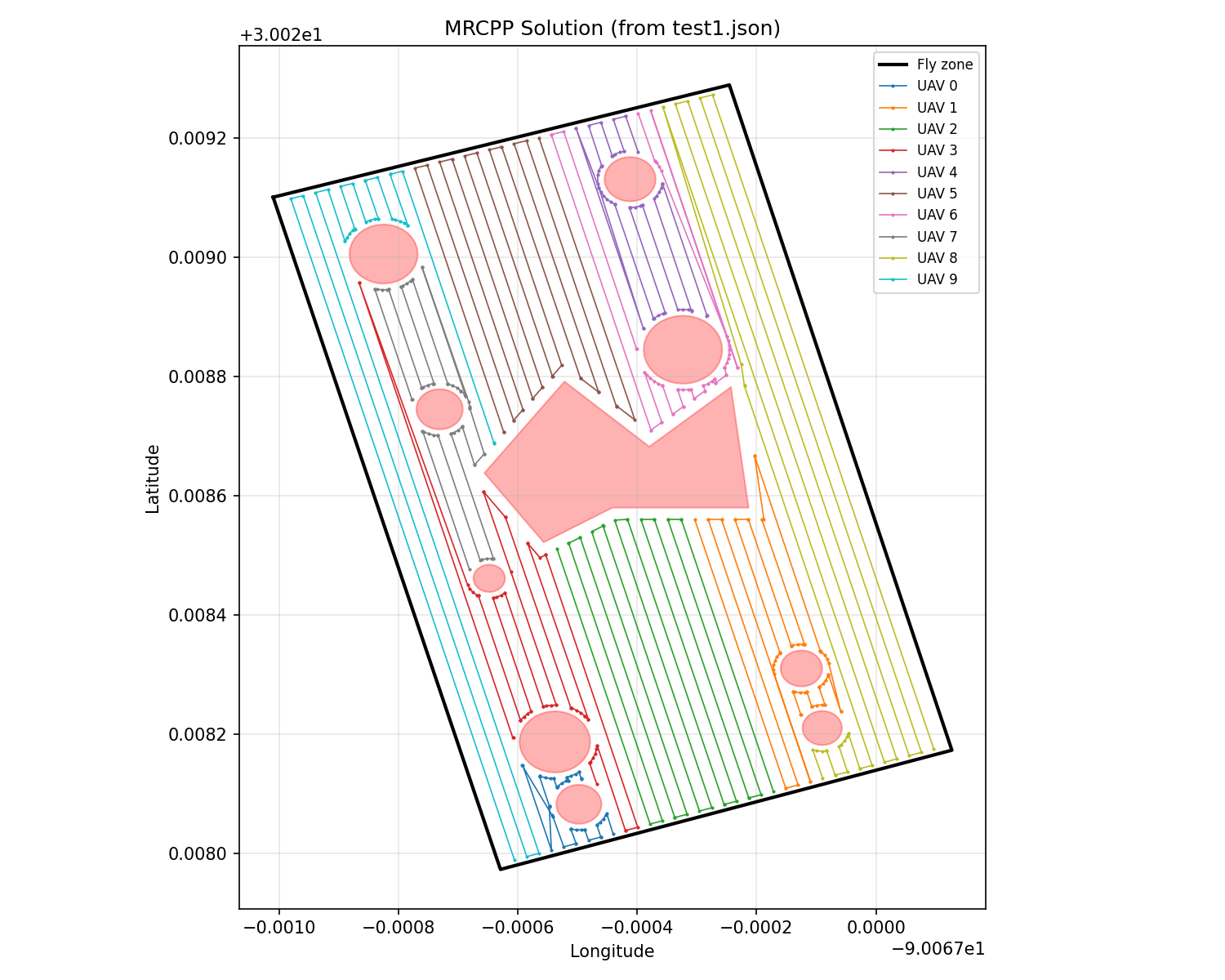
Table IV. MRCPP vs EAMCMP — Obstacle-Rich Environment (3 / 6 / 10 AAVs)
Performance comparison in an environment with 10 convex and non-convex obstacles.
Metrics: worst-case per-robot energy
(Eomax [Wh]),
total fleet coverage-only energy
(Ēt [Wh]),
and computation time
(Tc [s]).
Bold indicates the best value per fleet size.
| # Robots |
Method |
Eomax [Wh] |
Ēt [Wh] |
Tc [s] |
| 3 |
41.81 |
111.17 |
9.65 |
| 44.49 |
132.25 |
68.87 |
| 6 |
21.81 |
104.58 |
3.22 |
| 23.11 |
135.51 |
58.06 |
| 10 |
13.92 |
96.73 |
3.11 |
| 14.73 |
139.77 |
68.95 |
MRCPP is roughly 12× faster on average (5.33 s vs 65.29 s).
Its total fleet energy decreases by ~13% as the fleet grows from 3 to 10 AAVs,
reflecting effective workload distribution. EAMCMP's energy increases by ~5.7%
over the same range due to sensitivity to initial positions rather than geometric structure.